
|
I/O (TO)
TO4 Stepper Output
|
| Description | Set the Base Speed and Step/Rev based on the Stepper ratings. Use Speed Input as the speed reference. Enable will enable or disable the output signal. |
| Availability |
|
| savvy-SFD Graphic | 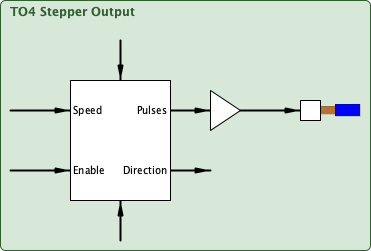 |
| Graphic with Parameters | 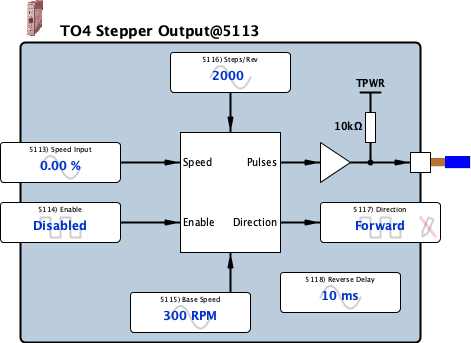 |
| Speed Input |
Input, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % Stepper1 - Speed Input
|
| Enable |
Input, Read-write, Boolean (signed 16-bit integer) Stepper1 - Enable
0 = Disabled 1 = Enabled |
| Base Speed |
Input, Read-write, Analog (signed 16-bit integer) -32767 RPM to 32767 RPM Stepper1 - Base Speed
|
| Steps/Rev |
Input, Read-write, Analog (signed 16-bit integer) 100 to 32767 Stepper1 - Steps/Rev
|
| Direction |
Output, Read-only, Boolean (signed 16-bit integer) 0 = Forward 1 = Reverse |
| Reverse Delay |
Internal Parameter, Read-write, Analog (signed 16-bit integer) 0 ms to 1000 ms |