
|
Winder
Torque Compensator
|
| Description | Torque Compensator
|
| Availability |
|
| savvy-SFD Graphic | 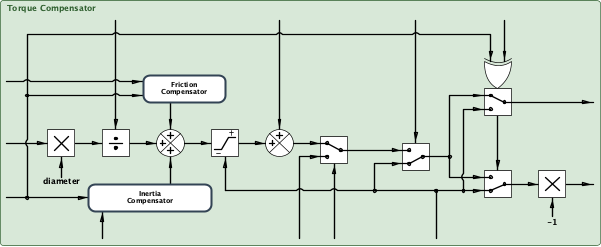 |
| Graphic with Parameters | 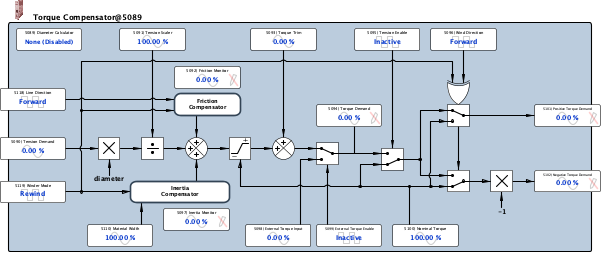 |
| Diameter Calculator |
Internal Parameter, Read-write, Function Block Association (signed 16-bit integer) |
| Tension Demand |
Input, Read-write, Analog (signed 16-bit integer) -100.00 % to 100.00 % |
| Tension Scaler |
Input, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Friction Monitor |
Internal Parameter, Read-only, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Torque Trim |
Input, Read-write, Analog (signed 16-bit integer) -150.00 % to 150.00 % |
| Torque Demand |
Internal Parameter, Read-only, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Tension Enable |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Inactive 1 = Enabled |
| Wind Direction |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Forward 1 = Reverse |
| Inertia Monitor |
Internal Parameter, Read-only, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| External Torque Input |
Input, Read-write, Analog (signed 16-bit integer) -150.00 % to 150.00 % |
| External Torque Enable |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Inactive 1 = Enabled |
| Nominal Torque |
Input, Read-write, Analog (signed 16-bit integer) 0.00 % to 150.00 % |
| Positive Torque Demand |
Output, Read-only, Analog (signed 16-bit integer) 0.00 % to 327.67 % |
| Negative Torque Demand |
Output, Read-only, Analog (signed 16-bit integer) -327.67 % to 0.00 % |
| Dynamic Friction |
Internal Parameter, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Static Friction |
Internal Parameter, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Stiction |
Internal Parameter, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Stiction Reel Speed Threshold |
Internal Parameter, Read-write, Analog (signed 16-bit integer) 0.00 % to 10.00 % |
| Stiction Web Speed Threshold |
Internal Parameter, Read-write, Analog (signed 16-bit integer) 0.00 % to 10.00 % |
| Variable Inertia |
Internal Parameter, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Material Width |
Input, Read-write, Analog (signed 16-bit integer) 0.00 % to 327.67 % |
| Fixed Inertia |
Internal Parameter, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Acceleration Time |
Internal Parameter, Read-write, Analog (signed 16-bit integer) 0.0 s to 3000.0 s 0 = Disable |
| Acceleration Filter Time Constant |
Internal Parameter, Read-write, Analog (signed 16-bit integer) 0.00 s to 300.00 s 0 = Off |
| Acceleration Monitor |
Internal Parameter, Read-only, Set to default on hard initialization, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| External Acceleration Input |
Internal Parameter, Read-write, Analog (signed 16-bit integer) -105.00 % to 105.00 % |
| Line Direction |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Forward 1 = Reverse |
| Winder Mode |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Rewind 1 = Unwind |