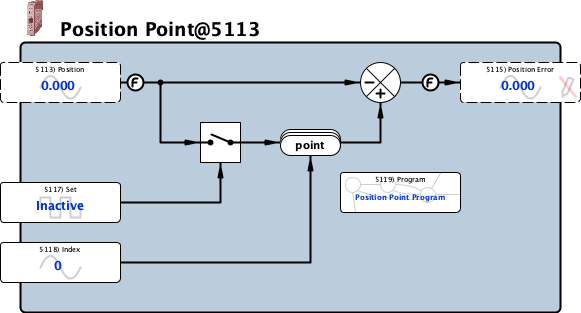
| Position |
Input, Read-write, Analog (32-bit IEEE-754 floating point value)
-340E36 to 340E36
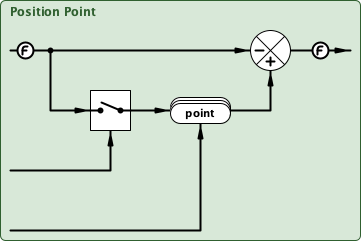
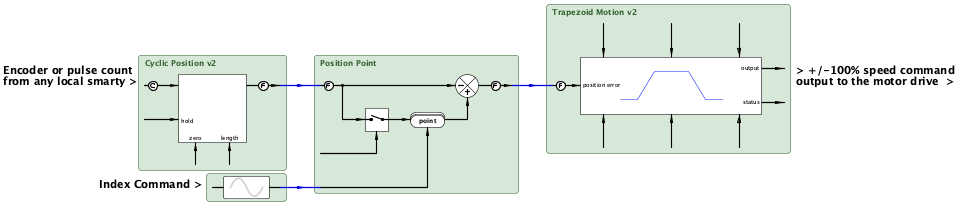
Position - Designed to be directly connected from the output of a Linear Position or Cyclic Position function block. That block defines the position scaling and zero point.
|
| Position Error |
Output, Read-only, Analog (32-bit IEEE-754 floating point value)
-340E36 to 340E36
Position Error - The position error from the indexed position. Typical connects directly to the input of Trapezoid Motion v2 function block.
|
| Set |
Input, Read-write, Boolean (signed 16-bit integer)
Set - Used for in-position setting of any of the indexed position points.
The motor is moved to the required, indexed position and the Set parameter is momentarily asserted.
0 = Inactive
1 = Set
|
| Index |
Input, Read-write, Analog (signed 16-bit integer)
0 to 99
Index - Freely define up to 100 indexed position points. The position points may be pre-programmed by the engineer using the savvy software either manually or via .csv file import or text import from another block.
Index points may also be defined automatically; The motor is moved to the index position and stopped. The Set parameter is toggled Active and then Inactive to set the position of that index.
|
| Program |
Internal Parameter, Read-write, Position Point Program (Byte Array)
Program - Click this parameter for the position point editor.
Manually enter position points or import/export from .CSV file which is easy to use with spreadsheets, etc.
|