
|
Control
PID v3
|
| Description | (description coming soon) |
| Availability |
|
| savvy-SFD Graphic | 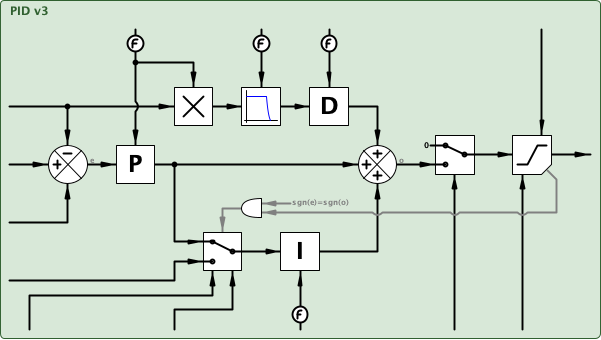 |
| Graphic with Parameters | 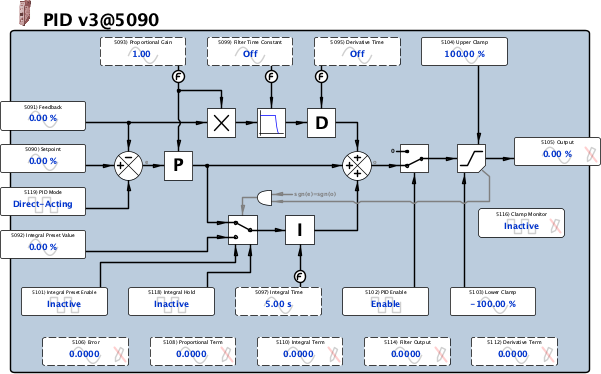 |
| Setpoint |
Input, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Feedback |
Input, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Integral Preset Value |
Input, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Proportional Gain |
Input, Read-write, Analog (32-bit IEEE-754 floating point value) 0.00 to 100000.00 |
| Derivative Time |
Input, Read-write, Analog (32-bit IEEE-754 floating point value) 0.00 s to 10000.00 s 0 = Off |
| Integral Time |
Input, Read-write, Analog (32-bit IEEE-754 floating point value) 0.00 s to 100000.00 s 0 = Off |
| Filter Time Constant |
Input, Read-write, Analog (32-bit IEEE-754 floating point value) 0.00 s to 10000.00 s 0 = Off |
| Integral Preset Enable |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Inactive 1 = Preset |
| PID Enable |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Disable 1 = Enable |
| Lower Clamp |
Input, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Upper Clamp |
Input, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Output |
Output, Read-only, Analog (signed 16-bit integer) -327.67 % to 327.67 % |
| Error |
Internal Parameter, Read-only, Analog (32-bit IEEE-754 floating point value) -32767.0000 to 32767.0000 |
| Proportional Term |
Internal Parameter, Read-only, Analog (32-bit IEEE-754 floating point value) -32767.0000 to 32767.0000 |
| Integral Term |
Internal Parameter, Read-only, Analog (32-bit IEEE-754 floating point value) -32767.0000 to 32767.0000 |
| Derivative Term |
Internal Parameter, Read-only, Analog (32-bit IEEE-754 floating point value) -32767.0000 to 32767.0000 |
| Clamp Monitor |
Internal Parameter, Read-only, Boolean (signed 16-bit integer) 0 = Inactive 1 = Clamping |
| Integral Hold Monitor |
Internal Parameter, Read-only, Boolean (signed 16-bit integer) 0 = Inactive 1 = Holding |
| Integral Hold |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Inactive 1 = Hold |
| PID Mode |
Input, Read-write, Boolean (signed 16-bit integer) 0 = Direct-Acting 1 = Reverse-Acting |