| Setpoint |
Input, Read-write, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
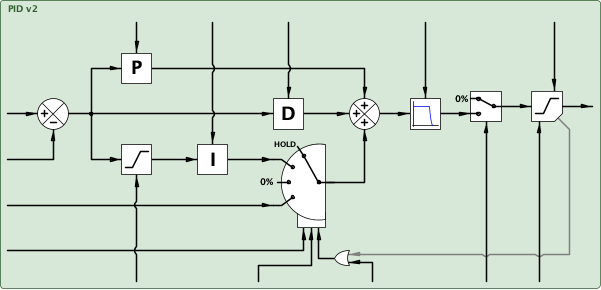
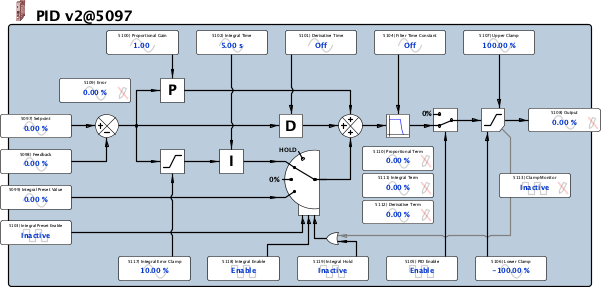
PID v2 - Setpoint - The closed-loop system's desired setpoint. The system's feedback signal is subtracted from the setpoint to produce the error term.
|
| Feedback |
Input, Read-write, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
PID v2 - Feedback - The closed-loop system's feedback signal. It is subtracted from the setpoint to produce the error term.
|
| Integral Preset Value |
Input, Read-write, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
PID v2 - Integral Preset Value - The integral term is immediately set to this value while Integral Preset Enable is active.
|
| Proportional Gain |
Input, Read-write, Analog (signed 16-bit integer)
0.00 to 100.00
PID v2 - Proportional Gain - The input error is multiplied by this value to produce the proportional term.
Larger proportional gains produce stronger responses. Too large a value can lead to system instability in the form of vibration or violent jerking. When the proportional gain is too small, system instability is characterized by slower hunting around the setpoint, possibly including large swings.
|
| Derivative Time |
Input, Read-write, Analog (signed 16-bit integer)
0.000 s to 10.000 s
0 = Off
|
| Integral Time |
Input, Read-write, Analog (signed 16-bit integer)
0.00 s to 100.00 s
PID v2 - Integral Time - The time in which the integral term will change by 100% in response to a 100% error input.
Smaller integral times produce faster responses. Too short an integral time can lead to system instability in the form of vibration or violent jerking. When the integral time is too long, system instability is characterized by slower hunting around the setpoint, possibly including large swings.
0 = Off
|
| Integral Preset Enable |
Input, Read-write, Boolean (signed 16-bit integer)
PID v2 - Integral Preset Enable - The integral term is immediately set to the integral preset value while this parameter is active.
0 = Inactive
1 = Preset
|
| Filter Time Constant |
Input, Read-write, Analog (signed 16-bit integer)
0.000 s to 10.000 s
0 = Off
|
| PID Enable |
Input, Read-write, Boolean (signed 16-bit integer)
PID v2 - PI Enable - Both the function block's output, and the integral term are immediately reset to 0.00% while this parameter is inactive.
0 = Disable
1 = Enable
|
| Lower Clamp |
Input, Read-write, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
PID v2 - Lower Clamp - Both the function block output and the integral term can not be less than this value.
When the output equals this number, the integral term is held at its current value.
|
| Upper Clamp |
Input, Read-write, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
p>PID v2 - Upper Clamp- Both the function block output and the integral term can not be greater than this value.
When the output equals this number, the integral term is held at its current value.
|
| Output |
Output, Read-only, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
PID v2 - Output - The function block output is used to provide negative feedback in a closed-loop system.
The output is typically connected to the Trim Input of a Trim function block, found in the Control function block group listing.
|
| Error |
Internal Parameter, Read-only, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
PID v2 - Error - Feedback input is subtracted from Setpoint to produce the input Error.
|
| Proportional Term |
Internal Parameter, Read-only, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
PID v2 - Proportional Term - The Error is multiplied by Proportional Gain to produce the Proportional Term.
|
| Integral Term |
Internal Parameter, Read-only, Set to default on hard initialization, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
PID v2 - Integral Term - The Error is clamped and then continuously integrated according to the Integral Time to produce the Integral Term
Integrator hold
|
| Derivative Term |
Internal Parameter, Read-only, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
|
| Clamp Monitor |
Internal Parameter, Read-only, Boolean (signed 16-bit integer)
PID v2 - Clamp Monitor - Active when the function block output is equal to the upper or lower clamp value.
The Integral Term is held at its current value while the clamp is active.
0 = Inactive
1 = Clamping
|
| Integral Error Clamp |
Input, Read-write, Analog (signed 16-bit integer)
0.00 % to 327.67 %
PID v2 - Integral Error Clamp - Places a symmetrical clamp around the function block input Error prior to passing the error to the integrator. This prevents saturation of the integral term that may be caused by large, transient input errors.
|
| Integral Enable |
Input, Read-write, Boolean (signed 16-bit integer)
PI v2 - Integral Enable - The integral term is immediately reset to 0.00% while this parameter is inactive.
0 = Disable
1 = Enable
|
| Integral Hold |
Input, Read-write, Boolean (signed 16-bit integer)
PID v2 - Integral Hold - The integral term is held at its current value while this parameter is active.
0 = Inactive
1 = Hold
|