|
Motion Control
Registration v1
|
| Description | Registration v1
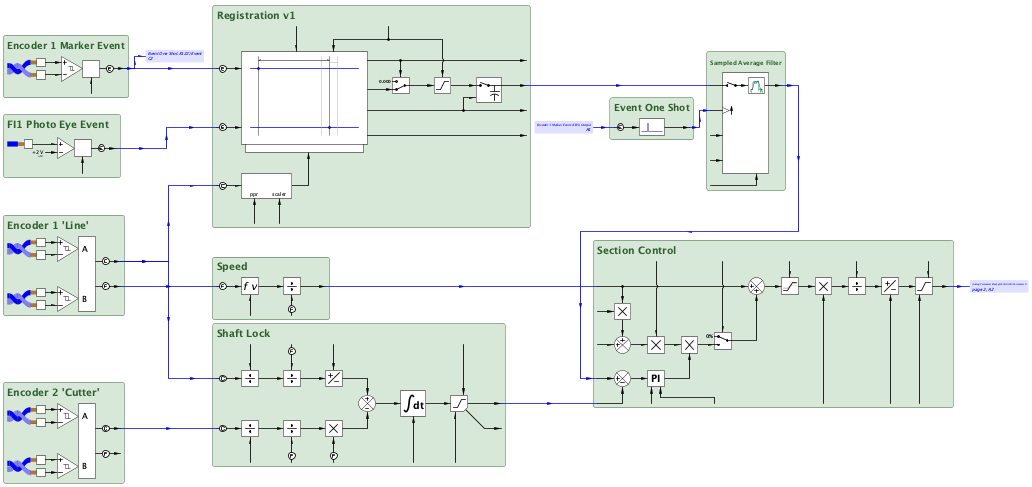
Application Example - Registration on Shaft Lock Examples include print cylinder registration and continuous cut-to-length. The material and print or cut head are locked and corrections are applied from the registration loop.
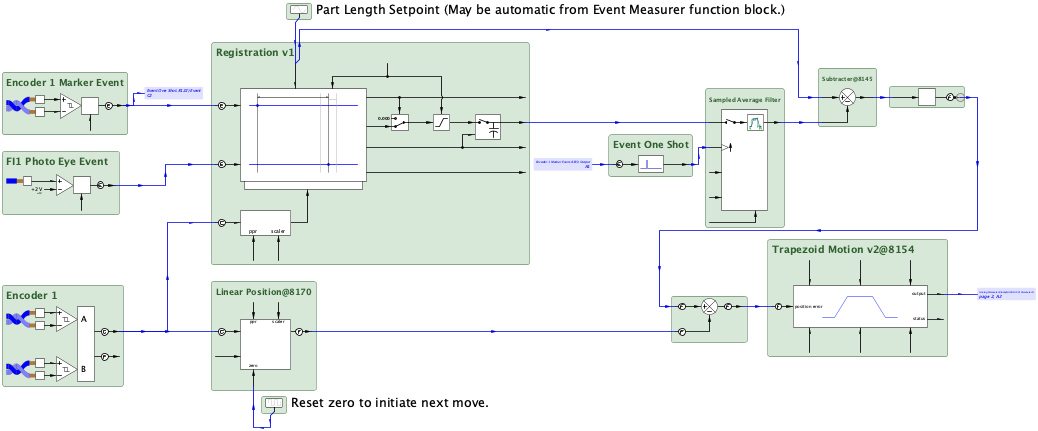
Application Example - Registration on Motion Control, Servo Haul-Off Examples include bag sealer-cutters with print registration, sheeters, and folders. The servo must haul-off the precise length of material during the allowable period after the cut and prior to the commencement of the next cut.
|
| Availability |
|
| savvy-SFD Graphic | 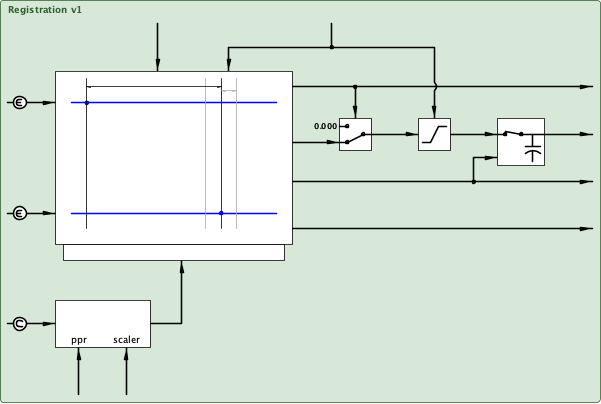 |
| Graphic with Parameters | 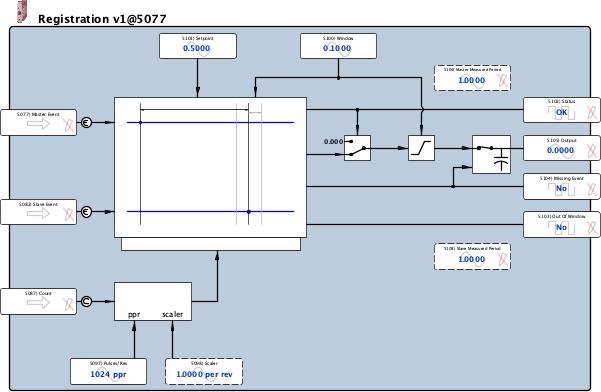 |
| Master Event |
Input, Read-only, Placeholder (special (timestamp)) Master Event
|
| Slave Event |
Input, Read-only, Placeholder (special (timestamp)) Slave Event
|
| Count |
Input, Read-only, Placeholder (special (count & timestamp)) Count
|
| Pulses/Rev |
Input, Read-write, Analog (signed 16-bit integer) 1 ppr to 30000 ppr |
| Scaler |
Input, Read-write, Analog (32-bit IEEE-754 floating point value) -340E36 per rev to 340E36 per rev |
| Window |
Input, Read-write, Analog (signed 16-bit integer) 0.0010 to 0.5000 Window
|
| Setpoint |
Input, Read-write, Analog (signed 16-bit integer) 0.0000 to 0.9999 Setpoint
|
| Status |
Output, Read-only, Boolean (signed 16-bit integer) Status
0 = OK 1 = Fault |
| Out Of Window |
Output, Read-only, Boolean (signed 16-bit integer) Out of Window
0 = No 1 = Yes |
| Missing Event |
Output, Read-only, Boolean (signed 16-bit integer) Missing Event
0 = No 1 = Yes |
| Output |
Output, Read-only, Analog (signed 16-bit integer) -3.2767 to 3.2767 Output
|
| Master Measured Period |
Internal Parameter, Read-only, Analog (32-bit IEEE-754 floating point value) 0.0000 to 340E36 Master Measured Period
0 = None Found |
| Slave Measured Period |
Internal Parameter, Read-only, Analog (32-bit IEEE-754 floating point value) 0.0000 to 340E36 Slave Measured Period
0 = None Found |