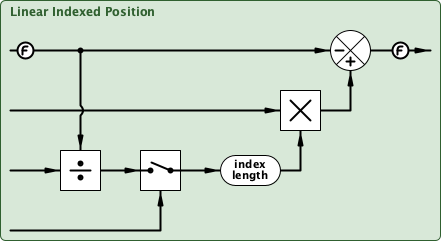
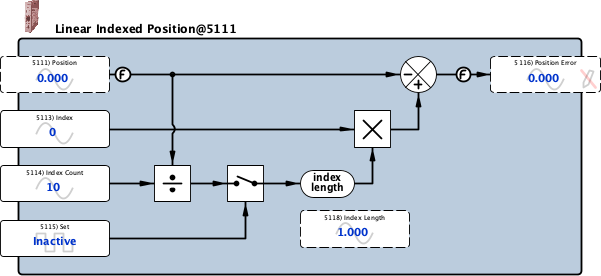
| Position |
Input, Read-write, Analog (32-bit IEEE-754 floating point value)
-340E36 to 340E36
Position - Designed to be directly connected from the output of the Linear Position function block. That block defines the position scaling and zero point.
|
| Index |
Input, Read-write, Analog (signed 16-bit integer)
-32767 to 32767
Index - Index 0 is defined to be at linear position 0.0000. With a default, 10-index cycle, index 10 is located at cyclic position 1.0000.
|
| Index Count |
Input, Read-write, Analog (unsigned 16-bit integer)
1 to 65535
Index Count - In most applications, this parameter is the total number of stop points in the cycle and is used to calculate the Index Length.
Generally, the distance between stop points is a constant value; however, if all of the stop points are exact multiples of some minimum Index Length, this parameter would be set to the total number of minimum Index Length's required to select the appropriate stop position.
|
| Set |
Input, Read-write, Boolean (signed 16-bit integer)
Set - The index length can be manually entered or via a drive.web connection or automatically; The motor is moved to the last index position and stopped. The Set parameter is toggled Active and then Inactive to set the index length.
0 = Inactive
1 = Set
|
| Position Error |
Output, Read-only, Analog (32-bit IEEE-754 floating point value)
-340E36 to 340E36
Position Error - The position error from the indexed position of any number of evenly-spaced indices.
|
| Index Length |
Internal Parameter, Read-write, Analog (32-bit IEEE-754 floating point value)
-340E36 to 340E36
Index Length - The index length can be manually entered or via a drive.web connection or automatically; The motor is moved to the last index position and stopped. The Set parameter is toggled Active and then Inactive to set the index length.
|