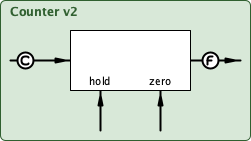
| Count |
Input, Read-only, Placeholder (special (count & timestamp))
Count - The count input is freely connectable from any single Encoder or FI function block Count output in any smarty on the local network.
|
| Hold |
Input, Read-write, Boolean (signed 16-bit integer)
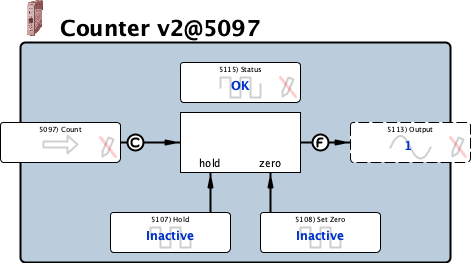
Hold - Hold input causes the count to hold at its current value and ignore any ongoing counts. The count resumes from the current value when made Inactive.
Typically, transitions of Hold should not occur while the count is actively incrementing. Transitions of Hold while the count is actively changing will be associated with an uncertainty equal to the counts per second times the timebase setpoint of the containing device. - Example
The Counter function block is located in a speedy with the default timebase, 5ms. The count is from a 1024PPR encoder spinning at 1800RPM. We have 4096 edges x 1800RPM / 60s x 0.005s = 614 count uncertainty with transitions at full speed. Other motion control function blocks with high-speed event input capability that may be useful; Registration, Event Measurer, Event Timer.
0 = Inactive
1 = Hold
|
| Set Zero |
Input, Read-write, Boolean (signed 16-bit integer)
Set Zero - The Set Zero input predominates. The Output is zero when Active and the count continues from zero when Inactive.
0 = Inactive
1 = Set
|
| Output |
Output, Read-only, Analog (32-bit IEEE-754 floating point value)
-340E36 to 340E36
Output - Provides the actual encoder edge count or frequency input pulse count.
The count input is freely connectable from any single Encoder or FI function block Count output in any smarty on the local network.
|
| Status |
Internal Parameter, Read-only, Boolean (signed 16-bit integer)
Status - The function block Status is Fault and the function block output is zero if the count input is not updated for a period longer than approximately twenty times the timebase, i.e. 100ms, by default.
0 = OK
1 = Fault
|