
|
Encoder
ENC Cyclic Error Converter
|
| Description | For a typical reversing cyclic positioning application, at any point in the cycle, your Desired Position is at most +50.00% (moving forward) or -50.00% (moving backwards) of the Cycle Length away from your Current Position. Therefore, when using the positioning function blocks, the Output yields a position error between +/-50.00%. This function block is intended for non-reversing cyclic positioning applications. Positive values (0.00% to +50.00%) are passed through unchanged. Negative values (-49.99% to -0.01%) are translated to positive values (50.01% to 99.99%). The negative values are translated to positive values the with the same physical position so the entire cycle may be smoothly traversed with only positive control values. 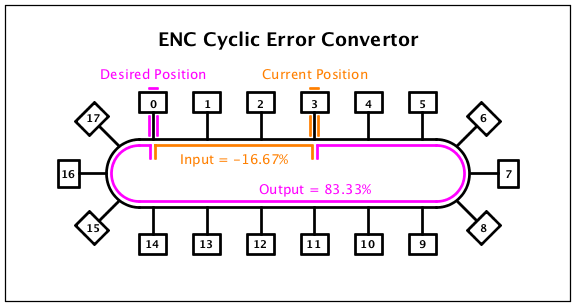 |
| Availability |
|
| savvy-SFD Graphic |  |
| Graphic with Parameters |  |
| Input |
Input, Read-write, Analog (signed 16-bit integer) -50.00 % to 50.00 % The bipolar value to be converted to a unipolar value. |
| Output |
Output, Read-only, Analog (signed 16-bit integer) 0.00 % to 99.99 % The unipolar value which may be used as a non-reversing control output. |