
|
Motion Control
Cyclic Unidirectionalizer
|
| Description | Cyclic Unidirectionalizer
|
| Availability |
|
| savvy-SFD Graphic | 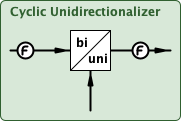 |
| Graphic with Parameters | 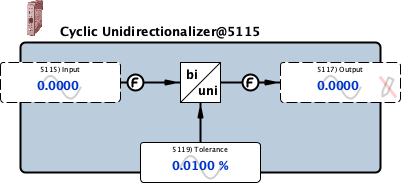 |
| Input |
Input, Read-write, Analog (32-bit IEEE-754 floating point value) -0.5000 to 0.5000 Input
|
| Output |
Output, Read-only, Analog (32-bit IEEE-754 floating point value) 0.0000 to 1.0000 Output
|
| Tolerance |
Input, Read-write, Analog (signed 16-bit integer) 0.0001 % to 3.2767 % Tolerance
|