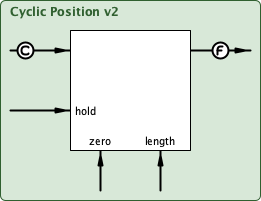
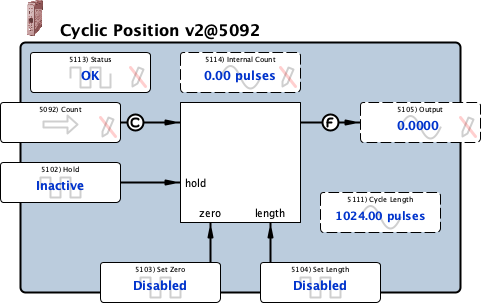
Provides the actual position from floating-point 0.0000 to 1.0000 of a repeating cycle.The count input is freely connectable from any single Encoder or FI function block Count output in any smarty on the local network.
The actual cycle length can be entered directly as the number of pulses including fractions of a pulse or it may be determined empirically by using the Set Length parameter. Move the motor to the beginning of the cycle, and momentarily enable this parameter. Now rotate the motor to the end of the cycle, stop, and enable the parameter again. The measured number of pulses will be entered automatically into Cycle Length.
The Set Zero input predominates over Hold. The Output is zero when Active and the position increments from zero when Inactive.
Hold input causes the output to hold at its current value and ignore any ongoing counts. The output resumes from the current value when made Inactive.
Transitions of Set Length, Set Zero, or Hold should not be commanded while the count is actively incrementing. Transitions that occur while the count is actively changing will be associated with an uncertainty equal to the revs per second times the timebase setpoint of the containing device.
- Example of position uncertainty from dynamic transitions -
The Cyclic Position function block is located in a speedy with the default timebase, 5ms.
The count is from an encoder spinning at 1800RPM.
Set Length is asserted momentarily by passing a prox switch.
1800RPM / 60s x 0.005s = 0.15 rev uncertainty with transitions at full speed.
Eliminate dynamic position uncertainty with other motion control function blocks having high-speed event input capability; Registration, Event Measurer, Event Timer.
The function block Status is Fault and the function block output is zero if the count input is not updated for a period longer than approximately twenty times the timebase, i.e. 100ms, by default.
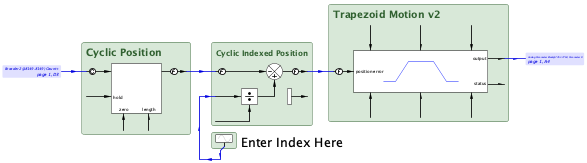
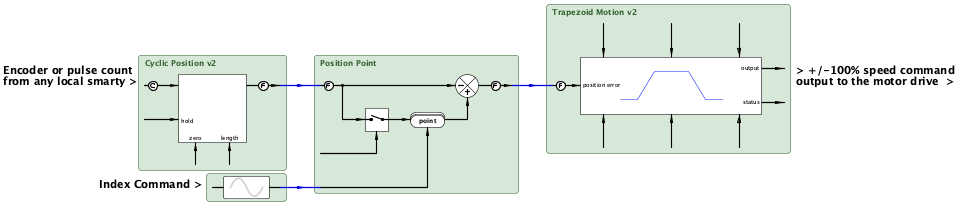
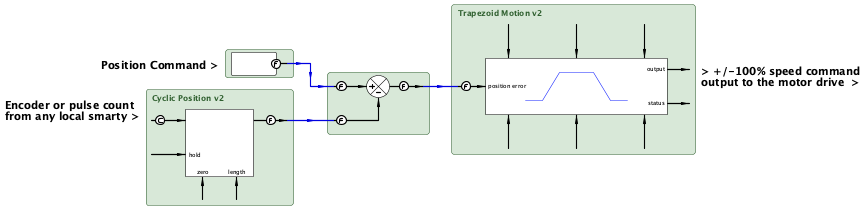
Design a complete motion control solution with three function blocks. The following pictures show examples of Cyclic Position v2 function block in three different systems. The first allows an index command to choose any position along evenly divided intervals. The second allows up to 100 positions to be pre-defined and selected via an index. The third system accepts explicit position commands.