| Position Setpoint |
Input, Read-write, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
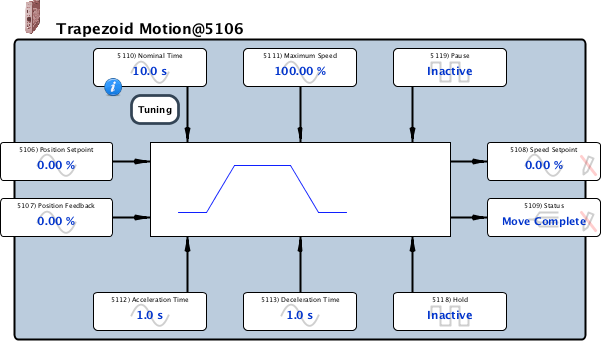
Trapezoid Motion - Position Setpoint - The position demand input.
Speed Setpoint will be zero when Position Feedback = Position Setpoint.
|
| Position Feedback |
Input, Read-write, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
Trapezoid Motion - Position Feedback - The current position.
Speed Setpoint will be zero when Position Feedback = Position Setpoint.
|
| Speed Setpoint |
Output, Read-only, Analog (signed 16-bit integer)
-327.67 % to 327.67 %
Trapezoid Motion - Speed Setpoint - The output of the Trapezoid Motion function block.
The velocity demands that will achieve the fastest move from the current position, Position Feedback, to move to the target postion, Position Setpoint.
|
| Status |
Output, Read-only, Enumerated (signed 16-bit integer)
Trapezoid Motion - Status - The current state of the move.
Equals zero for 'Move Complete' and non-zero when moving. This can be useful (convenient) for machine-sequencing.
0 = Move Complete
1 = Final Approach
2 = Accelerating
3 = Speed Clamped
4 = Decelerating
|
| Nominal Time |
Input, Read-write, Analog (signed 16-bit integer)
0.1 s to 3000.0 s
The time for the position to change by 100% when the Speed is 100%
|
| Maximum Speed |
Input, Read-write, Analog (signed 16-bit integer)
0.00 % to 327.67 %
Trapezoid Motion - Max Speed - This speed may not be reached with long ramps and / or short moves.
Status indicates Speed Clamped when this speed is reached.
|
| Acceleration Time |
Input, Read-write, Time or Rate (signed 16-bit integer)
0.1 s to 3000.0 s
Trapezoid Motion - Acceleration Time - The time to accelerate from zero speed to Maximum Speed.
This time is usually be determined by the capabilities and requirements of the application. Factors may include available motor torque, gain requirements and load momentum.
|
| Deceleration Time |
Input, Read-write, Time or Rate (signed 16-bit integer)
0.1 s to 3000.0 s
Trapezoid Motion - Deceleration Time - The time to decelerate from Maximum Speed to zero speed.
This time is usually be determined by the capabilities and requirements of the application. Factors may include available motor torque, gain requirements and load momentum.
|
| Latency |
Internal Parameter, Read-write, Analog (signed 16-bit integer)
0 ms to 1000 ms
Trapezoid Motion - Tuning - Latency - The time in ms required for the position loop to update completely.
It is important to set this correctly to avoid overshoots and instability. Consider all elements in the position loop that may contribute to latency; position feedback, velocity demand output, motor-drive velocity and torque loop propagation delays, mechanical latency.
|
| Final Approach |
Internal Parameter, Read-write, Analog (signed 16-bit integer)
0.05 % to 327.67 %
Trapezoid Motion - Tuning - Final Approach - Controls the position-control gain near the target position.
Higher values are more responsive and will approach more quickly. Excessive values may cause instability (small oscillations around the target position).
|
| Hold |
Input, Read-write, Boolean (signed 16-bit integer)
Trapezoid Motion - Hold - Hold causes Speed Setpoint to immediately reset to 0.00% when activated.
Speed Setpoint accelerates according to Acceleration Time after Hold becomes Inactive.
0 = Inactive
1 = Hold
|
| Pause |
Input, Read-write, Boolean (signed 16-bit integer)
Trapezoid Motion - Pause - Pause causes Speed Setpoint to ramp to 0.00% according to Deceleration Time when active.
Speed Setpoint accelerates according to Acceleration Time after Pause becomes Inactive.
0 = Inactive
1 = Pause
|